|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|

|
|
|
|
|
|
||||||||||
|
ARC+ Render Pro 11 - Camera Matching |
||||||||||||||||
|
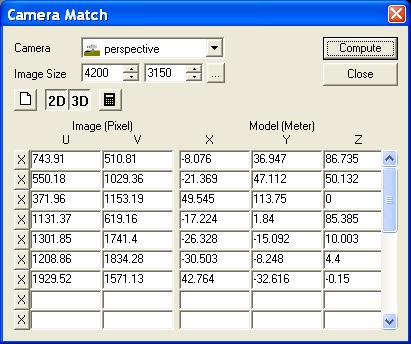
Camera matching and background matching assist in compositing virtual 3D model into real background photo. To calculate camera
using
perspective camera matching algorithm, pick corresponding 2D points on
background image and 3D points on 3D model.
Once the virtual camera has been computed to be in the same location and orientation as the real camera, you can render the 3D model on top of the photographed background image.
How do I collect calibration points? Calibration for the
model consists of the 3D (X,Y,Z) world coordinates of a feature point
(in meters) and the corresponding coordinates (U,V) (in pixels) of the
feature point in the image. How many points are required for the algorithm? The algorithm has
two variants: one for coplanar data and one for non-coplanar data. For
coplanar data the algorithm requires the z component of the 3D
coordinates to be 0.
|
|
Copyright © 2009 Graffiti Software
Industries Ltd. All Rights Reserved. Privacy Statement Terms of Use |